骨骼动画原理
骨骼动画原理
基础知识
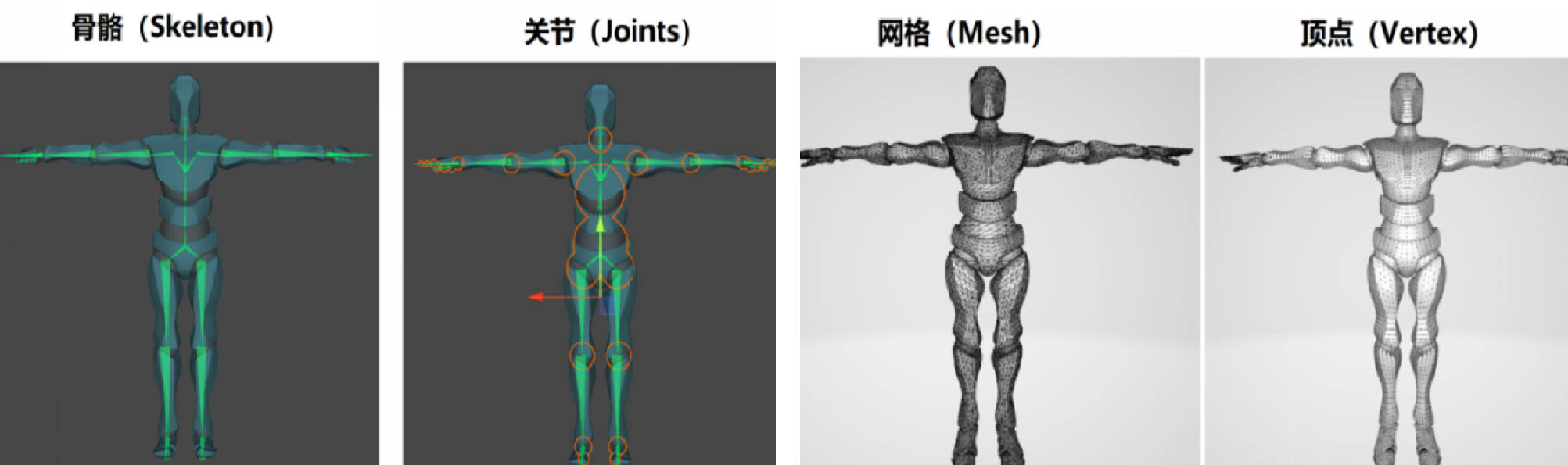
骨骼动画(Skeletal Animation) 是模型动画中的一种,通过改变骨骼的朝向和位置来为 模型 生成动画。
模型(Model)由一个个三角面组成,这种三角面也被称为 网格(Mesh),网格上有一个个 顶点(Vertex) 。
对应在骨骼动画中, 网格(Mesh) 也被称作 皮肤(Skin);骨骼之间的连接处称作 关节(Joints),骨骼可以绕着 关节 旋转。
骨骼动画的制作,我们一般先进行 蒙皮 ,然后运动时根据提前制作好的 关键帧 与在两个关键帧之间的 插值 进行 姿态调整 生成动画。
蒙皮
基础知识
对于两脚兽,一般使用 T-Pose 进行蒙皮,因为大部分姿势不会偏离它太大。
蒙皮 就是将 网格(Mesh) 的 顶点(Vertex) 给 绑定 在骨骼上,骨骼动画的本质就是用 骨骼 来操控 Mesh 动起来,Mesh 动起来的本质是 顶点 位置的改变。
一个 顶点 可能被多个 骨骼 影响(大部分情况一个顶点只会被一个骨骼影响,但是比如接近关节的顶点,单纯由一个骨骼影响可能会出现缝隙)。
确定被影响的方案就要使用 线性混合蒙皮(Linear Blend Skinning) 技术。
线性混合蒙皮
每个骨骼上会储存一个 变换矩阵(变换矩阵就是从 关节坐标系 到 世界坐标系 的 平移、旋转、缩放 矩阵的乘积,关节坐标系是以某个关节为原点的坐标系)
我们假设对这个顶点有影响的 骨骼 i 的 权重 为 w[i] 、变换矩阵为 M[i]、在 T-Pose 下的坐标为 V,那最后混合后的世界坐标 就为 sum(V * w[i] * M[i]),其中所有对其有影响的骨骼的权重之和为 1 。(其实这个公式就是按各个骨骼的权重比例转换,实际上是对每个骨骼的变换矩阵进行插值)
现在我们有了这个式子,需要的就是知道如何获得 变换矩阵,这就需要用到 正向动力学(Forward Kinematics) 了。
正向动力学
控制了关节的坐标,也就控制了骨骼、控制了模型。
关节可以构成一棵树(一般两脚兽以 盆骨 为根节点),每个节点存储了 相对父节点 的变换矩阵(我们可以叫它 小变换矩阵)。
这样,一个父节点移动的时候,可以带动子节点一起移动。
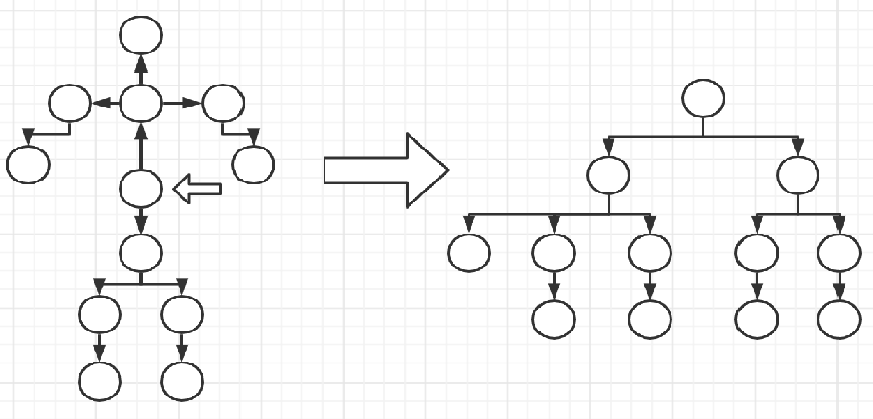
我们有了每个节点 相对父节点 的 小变换矩阵,从 关节坐标系 到 世界坐标系 的最终 变换矩阵 就由这一个个小变换矩阵累积获得,这个求解最终 变换矩阵 过程也就是 正向动力学 的本质。
实际上,每个节点的这个最终 变换矩阵 也就是从 根节点 到 该节点 路径上,每个 小变换矩阵 的乘积。
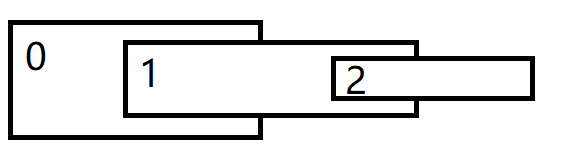
设骨骼 i 的 小变换矩阵 为 m[i],特别的,根节点的变换矩阵设为 O,那显然对上图:M[0] = O、M[1] = m[1]* O、M[2] = m[2] * m[1] * O = M[1] * O,显然可以通过在树上进行一次遍历求得。
求解这个问题,这就是 正向动力学 了(一看就很 正向,从根节点 正向 往下走到叶节点)
姿态调整
基础知识
动画师编辑骨骼进行若干姿态的调整,在 关键帧 中我们直接手动调整姿态。
在非关键帧(两个关键帧之间的 插值 得到的)动画,也会有姿态的变换。
如何进行姿态的调整有两种方案:
- 对 变换矩阵 进行插值,需要用到 正向动力学(Forward Kinematics)。
- 对部分 关节坐标 进行插值,然后逆推所有坐标,需要用到 逆向动力学(Inverse Kinematics)
逆向动力学
对于关节树,给定末端的 关节坐标 ,怎么获得每个关节的坐标,从下往上 逆向 求解,就是 逆向动力学 的本质。
逆向动力学的解决方案一般是 CCD(Cyclic Coordinate Descent) 或 CAA(Circular Alignment Algorithm) 等。
CCD(循环坐标下降算法)
CCD 在关节链的上执行一系列旋转,从最后一个链节开始,每次尝试将 末端 移近 目标坐标,采用迭代的方式逐渐处理。
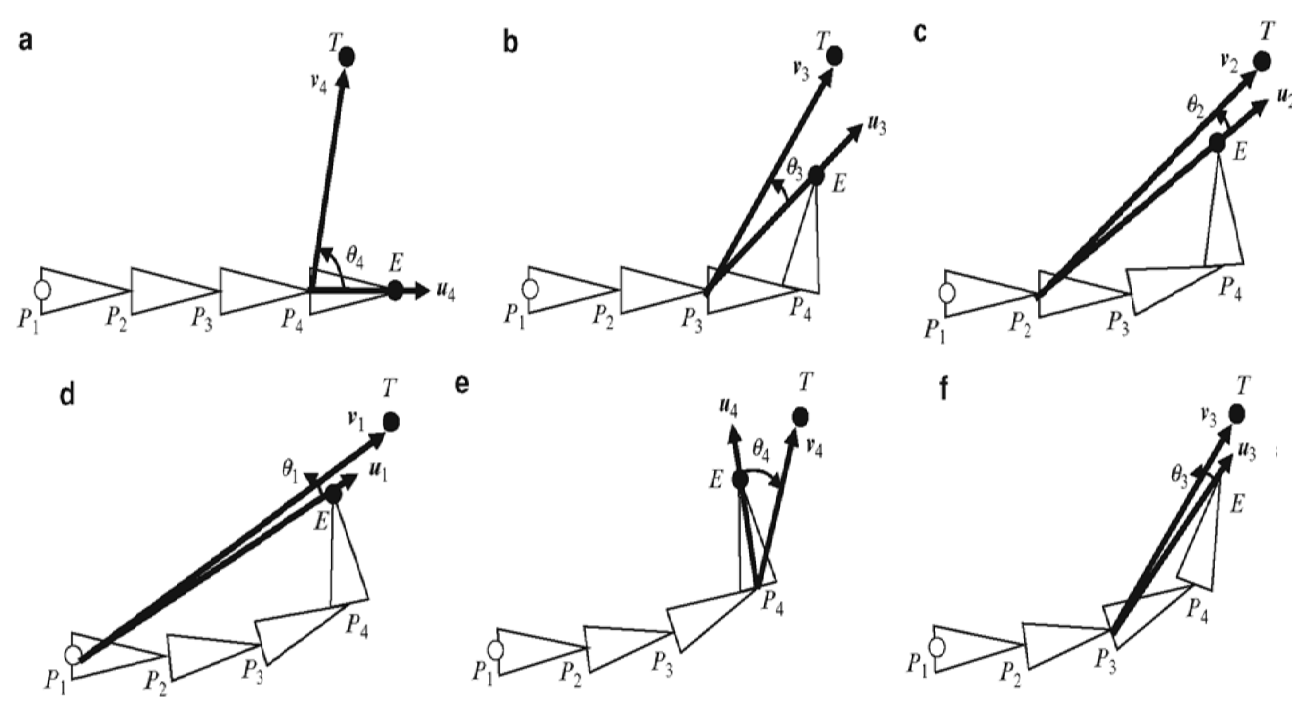
CCD 算法也有不足之处:
-
一组关节的物理系统一般有 关节角度约束 等物理限制,在解决 逆向动力学 的时候需要考虑到这些限制。CCD 算法可以生成可能 违反关节角度约束 的大角度旋转。
-
在某些情况下,特别是当靠近目标坐标时,CCD 算法会导致一条链形成循环 与自身相交。
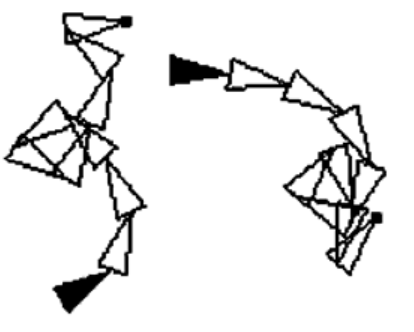
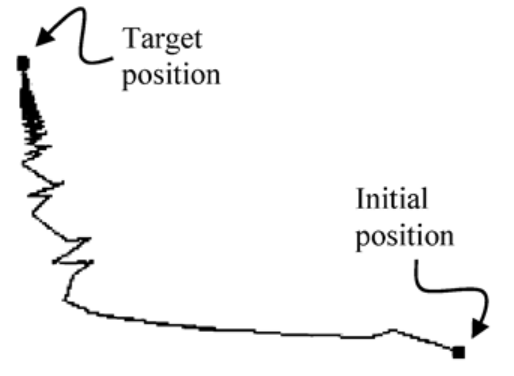
- 在某些情况下,CCD 可能会进行大量迭代,导致末端缓慢的 锯齿形运动。
CAA(Circular Alignment Algorithm) 可以克服这些缺点。
CAA(圆形对齐算法)
CCA 给定的关节链沿 基点 和 可到达的目标位置 之间的若干圆弧。通过这些圆弧,计算可接受范围内的关节角度,实现 逆向动力学。
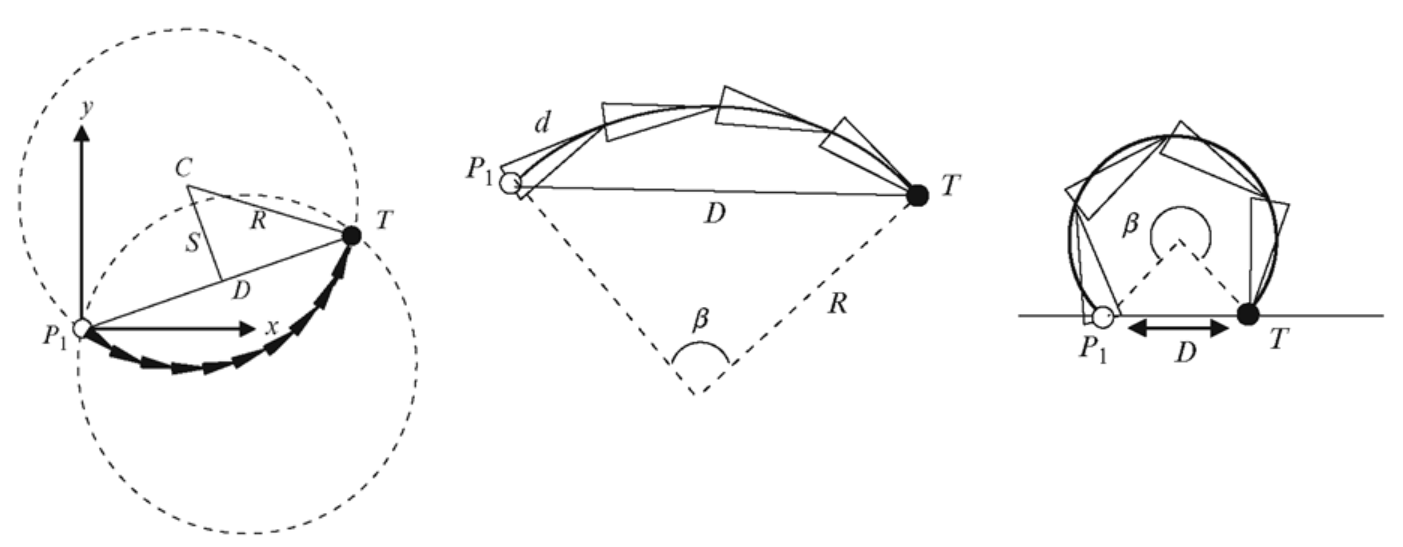
CAA 要求所有圆弧具有相同的长度,以便计算。
CAA 在包含圆弧的 基点 和 目标坐标 的二维平面上工作。因此,一般的三维问题会被简化为二维问题,所有关节链都被限制为在单个平面上移动。
插值
让非关键帧动画 平滑且连续 需要用到插值;空间变换有三种操作:平移、旋转、缩放。
其中,平移、缩放,显然可以平移矩阵、缩放矩阵直接进行 线性插值,但是旋转显然不行,旋转是在一个球面上移动,我们需要用到 四元数 进行 球面线性插值 。
参考
GPU Skinning:骨骼动画原理:https://zhuanlan.zhihu.com/p/126293705
浅谈骨骼动画技术原理:https://zhuanlan.zhihu.com/p/431446337
Kinematics (Advanced Methods in Computer Graphics) :http://what-when-how.com/advanced-methods-in-computer-graphics/kinematics-advanced-methods-in-computer-graphics-part-4/